项目描述
实验原理
本实验项目,结合《矿山测量学》课程内容及要求,针对高成本、高危、难以实际开展的矿井联系测量实验项目,开发虚拟仿真平台,构建高度仿真的虚拟实验环境和实验对象,学生在不同学习阶段,利用三维软件和键盘鼠标等输入设备,开展一井定向、陀螺定向、导入高程以及井下坐标与高程传递等矿井联系测量虚拟仿真实验,获得不同层级知识,达到不同目标:
----在矿山测量课程学习中,学生可利用虚拟仿真资源,进行相关认知、实验及分析,熟悉矿井联系测量工作的原理及基本方法,助推自主学习,实施翻转课堂教学。
----对测绘工程本科专业,在《矿山测量学》课堂教学结束之后,将集中进行为期2周的生产实习。集中实习中,首先利用矿井联系测量虚拟仿真实验教学系统让学生了解矿井联系测量在矿山建设中的作用和任务,熟练掌握矿井联系测量专用设备的特殊结构,实际操作方法,系统掌握矿井联系测量设备安装、外业观测、内业数据处理全过程的基本技能,再结合实训场真实实验、矿山现场观摩和观看录相等过程,虚实互补优化,分析矿井联系测量误差来源及精度控制方法,进行方案设计及优化,多层次提升分析和解决复杂工程问题的能力。
----在矿山测量课程学习后,学生可利用虚拟仿真资源,完成矿井联系测量方面的大学生科研、创新研究及毕业设计。
矿井联系测量虚拟仿真实验内容包括:
(1)井上下三维环境认知;
(2)平面联系测量(一井定向测量,陀螺定向);
(3)高程联系测量(导入高程);
(4)井下坐标传递(井下导线测量);
(5)井上高程传递(井下水准测量)。
主要实验项目见表2-3-1。
.png)
图2-3-1 本项目要求学生掌握关键知识点
表2-3-1 集中实习阶段矿井联系测量虚拟仿真实验内容
|
序号 |
矿山测量虚拟仿真子项目 |
实验类型 |
学时 |
|
1 |
一井定向测量 |
必做 |
2 |
|
2 |
陀螺定向 |
必做 |
2 |
|
3 |
导入高程测量 |
必做 |
2 |
|
4 |
井下导线测量 |
必做 |
2 |
|
5 |
井下水准测量 |
必做 |
2 |
|
6 |
井下三维环境浏览 |
选做 |
1 |
集中实习阶段矿井联系测量虚拟仿真实验要求如下:
(1)学生利用注册账号,在指导教师指导下完成各项矿井联系测量虚拟仿真实验内容。包括实验内容选择、人员和角色分工、仪器选择、外业和模拟数据填写、内业处理等过程。
(2)严格按照规程作业,各项限差均不得超过《煤矿测量规程》的规定。依据虚拟仿真系统提示,利用键盘鼠标等交互输入工具,完成完整实验的模拟和成果提交。
(3)实验结束时,每人提交一份实验报告,实验资料编入实验报告。实验过程中,可以利用系统提供的交流平台,完成实验答疑等交流。
2-3-1、知识点1——矿井联系测量
将矿区地面平面坐标系统和高程系统传递到井下的测量,称为联系测量。矿井联系测量的目的是使地面和井下测量控制网采用同一坐标系统,具体工艺流程如图2-3.1。
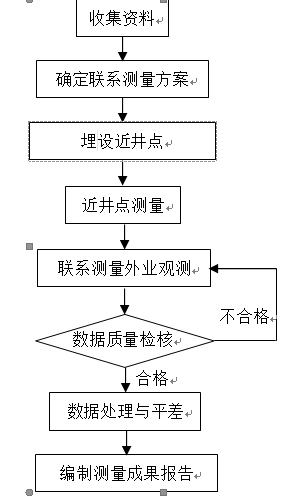
图2-3.1 联系测量工艺流程
主要知识点如下:
(1)将地面平面坐标系统传递到井下的测量称平面联系测量,简称定向(本实验项目中涉及的一井定向、陀螺定向仿真实验)。
(2)将地面高程系统传递到井下的测量称高程联系测量,简称导入高程(本实验项目的导入高程仿真实验)。
(3)联系测量的任务在于确定:
①井下导线起算边的坐标方位角;②井下导线点的平面坐标x和y;③井下水准基点的高程H。上述任务分别对应本实验项目的井下导线和井下水准测量。
2-3-2、知识点2——一井定向
1、实验目的
是在一个井筒内悬挂两根钢丝(或同时铅垂地发射两条可见光束),将地面点的坐标和边的方位角传递到井下的测量工作。
2、主要知识点
一井定向工作分为投点和连接两个部分。
(1)投点
由地面向定向水平投点(简称投点)。主要模拟单重摆动投点法的投点过程和主要方法。
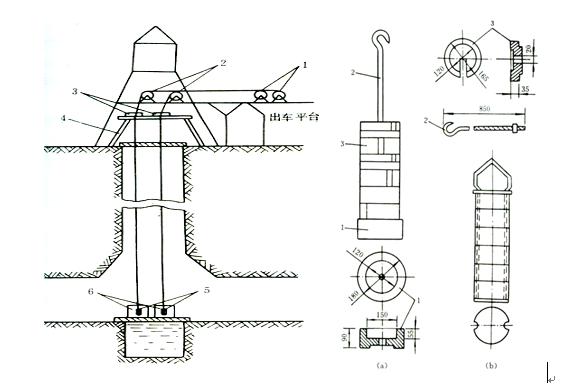
图2-3.2 一井定向示意及注意设备图
①投点主要设备安装与投点方法。垂球、钢丝、绞车、导向滑轮、定点板等主要投点设备的作用与安装方法。
②钢丝下放方法。缓慢下放,限制摆动,考虑钢丝伸长量。
③钢丝自由悬挂的检查。用信号圈法或比距法检查钢丝是否自由悬挂。
④采用单标尺法进行摆动投点。将一个具毫米刻划的标尺放在钢丝之后,垂直于望远镜视线,然后在经纬仪望远镜中观察钢丝摆动,当钢丝摆动到两端逆转点时均以钢丝外缘在标尺上的位置读取读数,估读至0.1mm。连续读取25个读数,一个端为12个,另一端为13个。取其左、右两端读数平均值的中数作为垂球线在标尺上的稳定位置。
.png)
.png)
图2-3-3 一井定向示意及注意设备图
(2)连接方法
在地面和定向水平上与垂球线连接(简称连接),其示意见图2-3-3。
模拟连接三角形法外业数据采集方法。
①连接三角形应构成延伸形。在选择井上下连接点C和C′时应满足下列要求:
a. CD和C'D'边应尽量大于20米;
b. 点C与C'应尽可能在AB延长线上。使三角线的锐角小于20;
c. 点C与C'应适当靠近最近的垂球线,使a/c之值一般应小于1.5。
②测角。在连接点C测量φ和γ两个角度,应采用精度不低于J6的经纬仪或者全站仪进行观测。
③量边。应采用本组检定过的钢尺,加标准拉力并记温度,悬空丈量水平边长。在垂球线稳定的情况下,应用钢尺以不同起点丈量六次。取其平均值作为丈量结果,同一边长各次观测值互差不得大于2mm。
在垂球摆动情况下,应将钢尺沿所量三角形的各边方向固定,然后用摆动观测的方法(至少连续读取六个读数)确定钢丝在钢尺上的稳定位置,以求得边长。每边均须用上述方法丈量两次,两丈量互差不大于3mm时,取其平均值作为丈量结果。
3、数据处理
(1)解算连接三角形
采用正弦公式求α和β角:
(2)为检查三角形各边丈量的正确性,应按下式计算两垂球连线长度C

C值的丈量与计算值之差,在井上连接三角形中不得超过2mm;在井下连接三角形中不得超过4mm。计算模式参见教科书。
(3)坐标计算:按一般导线计算方法进行。
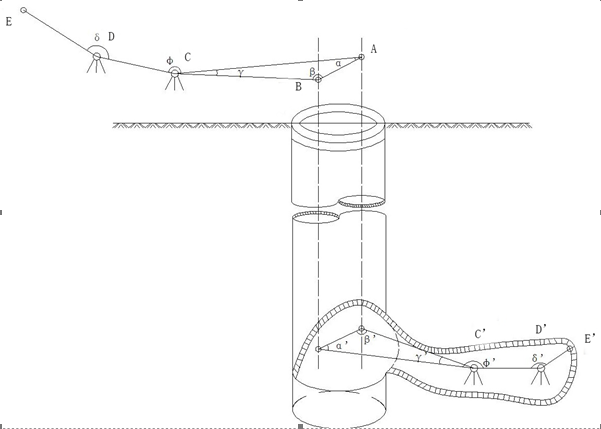
图2-3.3 一井定向联系三角测量示意图
2-3-3、知识点3——陀螺定向
1、实验目的:
使用陀螺经纬仪(全站仪),将地面已知边的坐标方位角传递到井下定向边。
2、主要知识点
(1)了解陀螺经纬仪(全站仪)的结构及操作方法;
(2)掌握逆转点法、中天法观测陀螺北方向的观测方法。
3、实验内容:
(1)利用虚拟现实实验设备,熟悉陀螺经纬仪(全站仪)的构造、定向原理、仪器操作。
①打开照明开关,观察视窗光标情况。
②打开启动开关,陀螺转子启动转子达到额定转速。
③打开锁紧装置,慢慢下放陀螺,使陀螺灵敏部缓缓下放。操作者同时在目镜镜中观察,当手轮到达某一位置后,手上有定位感觉,此为半脱位置,光标象开始晃动起来,此时应稍停几秒钟,观察光标移动情况,注意限幅(限幅时使光标与零刻划线一致,慢慢托起,再慢慢放下)至到将陀螺房下放到位。
④观测完毕,先将陀螺房慢慢托起。
⑤按下制动开关,将陀螺制动,再按下关断开关,关掉电源,待陀螺静止后拆卸仪器。
(2)陀螺北方向观测
逆转点法:
a)严格整置经纬仪,以一个测回测定待定和已知测线的方向值,然后将仪器大致对正北方。
b)锁紧摆动系统,启动陀螺马达,待达到额定转速后,下放陀螺灵敏部,进行粗略定向,再制动陀螺并托起锁紧,将望远镜视准轴转到近似北方位置,固定照准部,把水平微动螺旋调到行程中间位置。
c)打开陀螺照明,下放陀螺灵敏部,进行测前悬带零位观测,同时用秒表记录自摆周期。零位观测完毕,托起并锁紧灵敏部。
d)启动陀螺马达,达到额定转速后,慢慢下放灵敏部到半脱离位置,稍停数秒,再全部下放。用水平微动螺旋微动照准部,让光标像与分划板零刻划线随时重合,在摆动到逆转点时,连续读取5个逆转点读数。然后锁紧灵敏部,制动陀螺马达。
e)进行测后零位观测。
f)以一个测回测定待定和已知测线的方向值。
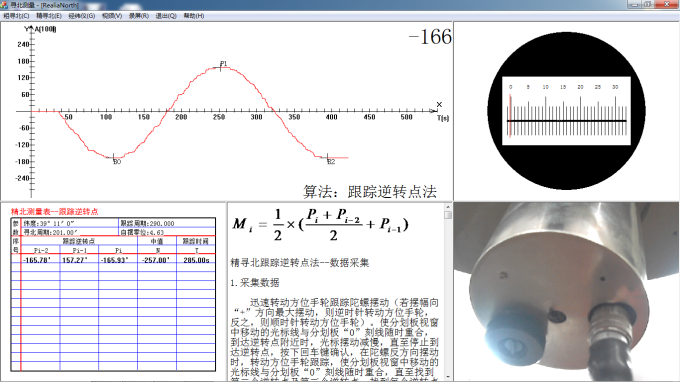
图2-3.5 陀螺定向逆转点法测量示意图
中天法:
和逆转点法一样进行粗略定向和零位测定,启动陀螺马达,到达额定转速后下放灵敏部,经限幅,使光标像摆幅不超过目镜视场。然后按下列顺序观测:
a)灵敏部指标线经过分划板零刻划线时启动专用秒表,读取中天时间t0;
b)灵敏部指标线到达逆转点时,在分划板上读取摆幅读数aW;
c)灵敏部指标线返回零刻划线时读出秒表上的读数t1;
d)灵敏部指标线到达另一逆转点时读取摆幅读数aE;
e)灵敏部指标线返回零刻划线时再读取秒表上中天时间t2。重复上述操作,一次定向需连续测定5次中天时间,记录不跟踪摆动周期。观测完毕,托起并锁紧灵敏部,制动陀螺马达。
f)进行测后零位观测
g)以一个测回测定待定和已知测线的方向值

图2-3.6 陀螺定向中天法测量示意图
3、数据处理:
(1)逆转点法观测数据处理
用5个连续逆转点读数计算陀螺北方向值。
(2)中天点法观测数据处理
用三个连续中天时间计算近似北方向的改正数:
△N=c·a· △t
式中c为比例
常数;
若不考虑悬带零位改正,则陀螺北方向值:
NT=N′+ c·a· △t
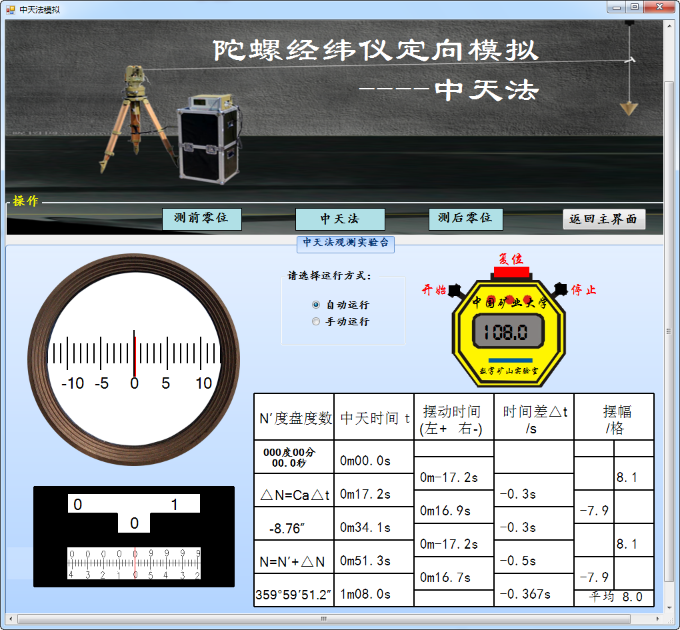
图2-3.7 陀螺定向中天法数据处理示意图
2-3-4 知识点4——导入高程
1、实验目的
在井下建立一个与地面统一的高程系统,确定各种采掘巷道、硐室在竖直方向上的位置及相互关系,以解决各种采掘工程在竖直方向上的几何问题。
2、主要知识点
掌握利用水准仪、水准尺、钢尺、垂球等实验设备,完成井上高程导入井下的工艺流程和关键技能。
3、实验步骤
(1)在井筒中部悬挂一钢尺,在钢尺下端悬以重锤,使其处于自由悬挂状态;分别在井上、井下选择A、B两点并安置水准仪。
(2)在井上、井下同时用水准仪测得A、B处水准尺上的读数a和b,并用水准仪瞄准钢尺,测得井上、井下的钢尺读数m和n。
(3)在已知A点高程的情况下,利用公式HB=HA-((m-n)-(b-a)),计算出B点高程,即导入高程。
.png)
图2-3-8 导入高程示意
2-3-5 知识点5——井下导线测量
1、实验目的
在井下布设导线点,用经纬仪或全站仪测出其坐标,建立井下平面控制系统,作为测绘和标定井下巷道、硐室、回采工作面等的基础。
2、主要知识点
(1)井下巷道环境中导线点布设的特点与要求。
(2)井下特殊条件下导线测角、量边方法。
3、实验内容与方法步骤
(1)井下导线点布设要求
导线点应当选在巷道稳定、安全、便于安置仪器的巷道顶板上,避开淋水、片帮、落石和其他不安全因素;
相邻导线点之间通视良好,并应保持导线点间距离适当,在巷道的连接处和交叉口处,应当埋设导线点;
为了避免运输干扰,应尽量将点设在远离运输轨道的一侧。
(2)井下导线测量器材:经纬仪、全站仪、铅垂球、棱镜、三脚架、钢尺、拉力计、温度计等。
(3)井下导线测量步骤:
.png)
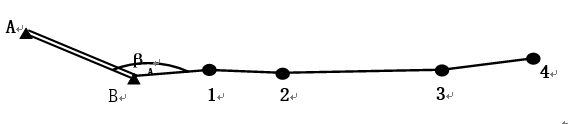
图2-3-9 井下支导线测量示意图
如图2-3-9,图中A、B点坐标已知。
①在巷道测站点B架设仪器,安装防风板,点下对中、整平,在前后视顶板导线点A、1悬挂垂球线,照亮垂球线,觇标对中。
②用测回法进行角度测量。首先照亮后视目标与望远镜十字丝并瞄准,然后照亮仪器读数窗读取后视点(盘左)水平度盘和垂直度盘读数,顺时针转动水平度盘照准前视点,观测前视点(盘左)水平度盘和垂直度盘读数;再进行下半测回操作,先观测前视点(盘右)水平度盘和垂直度盘读数,逆时针转动水平度盘照准后视点,观测后视点(盘右)水平角。
③边长采用光电测距或钢尺丈量,钢尺丈量需悬空丈量并测计拉力和温度。
以点1为测站架设全站仪,以B点为后视点、2点为前视点进行测量,方法同步骤②,以此类推,至以点3为测站并完成测量记录,往测结束。
④接下来进行返测,方法同步骤②,不过要注意前视点、后视点的区分。
2-3-6 知识点6——井下水准测量
1、实验目的
在井下布设导线点,用经纬仪或全站仪测出其坐标,建立井下平面控制系统,作为测绘和标定井下巷道、硐室、回采工作面等的基础。
2、主要知识点
(1)井下巷道环境中导线点布设的特点与要求。
(2)井下特殊条件下导线测角、量边方法。
3、实验内容与方法步骤
(1)井下导线点布设要求
导线点应当选在巷道稳定、安全、便于安置仪器的巷道顶板上,避开淋水、片帮、落石和其他不安全因素;
相邻导线点之间通视良好,并应保持导线点间距离适当,在巷道的连接处和交叉口处,应当埋设导线点;
为了避免运输干扰,应尽量将点设在远离运输轨道的一侧。
(2)井下导线测量器材:经纬仪、全站仪、铅垂球、棱镜、三脚架、钢尺、拉力计、温度计等。
(3)井下导线测量步骤:
如图2-3-8,图中A、B点坐标已知。
①在巷道测站点B架设仪器,安装防风板,点下对中、整平,在前后视顶板导线点A、1悬挂垂球线,照亮垂球线,觇标对中。
②用测回法进行角度测量。首先照亮后视目标与望远镜十字丝并瞄准,然后照亮仪器读数窗读取后视点(盘左)水平度盘和垂直度盘读数,顺时针转动水平度盘照准前视点,观测前视点(盘左)水平度盘和垂直度盘读数;再进行下半测回操作,先观测前视点(盘右)水平度盘和垂直度盘读数,逆时针转动水平度盘照准后视点,观测后视点(盘右)水平角。
③边长采用光电测距或钢尺丈量,钢尺丈量需悬空丈量并测计拉力和温度。
以点1为测站架设全站仪,以B点为后视点、2点为前视点进行测量,方法同步骤②,以此类推,至以点3为测站并完成测量记录,往测结束;
④接下来进行返测,方法同步骤②,不过要注意前视点、后视点的区分。
2-3-7 知识点7——井下水准测量
1、实验目的
在井下布设高程点,用水准仪测出其高差,建立井下高程控制系统,确定各种采掘巷道、峒室、工作面在竖直方向上的位置及相互关系。
2、主要知识点
(1)井下巷道环境中高程点布设的特点与要求。
(3)井下特殊条件下水准测量方法。
3、实验内容与方法步骤
(1)井下高程点布设要求。井下高程点可以设置在巷道顶板、底板或两帮上,也可以设在井下固定设备的基础上;一般每隔300~500米设一组,每组至少由两个永久固定的高程点组成;两点间距以30~80米为宜。
(2)水准测量外业。受井下巷道条件限制,井下水准测量一般采用两次仪器高法,所用仪器为光学水准仪和塔尺。
①将水准仪大致安置在前、后尺中间(前后水准点间距以30—80米为宜),用圆水准器整平。
②在后视点上竖立塔尺(如果后视点在顶板上,塔尺需倒立),用矿灯照亮并瞄准塔尺,用微倾螺旋使水准管精确整平,照亮水准仪十字丝,读取后视尺读数a。
③在前视点上竖立塔尺(如果前视点在顶板上,塔尺需倒立),用矿灯照亮并瞄准塔尺,用微倾螺旋使水准管精确整平,照亮水准仪十字丝,读取前视尺读数b。
④前后视高差计算。两点间高差 h=a-b,测点在顶板上时,水准尺读数前冠以“-” 号。
⑤变更水准仪高度不小于10cm,重复1-3步骤。
⑥检查两次仪器高所测得两个高差之互差,若不大于5mm时,后尺和仪器方可移动。
(3)往返水准路线平差计算:(支水准路线)从一高级水准点出发,经过测定其它各点高程到终点,又从终点返测到原来高级点的往返路线。支水准路线长度为300~500m.其高差闭合差:fh测=∑h往+∑h返;当fh测≤fh容时,认为外业测量成果合格,否则须重测。